Blog
All
Product Release Tutorial Article Community Spotlight Actuate Visualization Data Management MCAP ROS

Review: Getting Started with the Yahboom Transbot
TutorialROSVisualizationFeb 16, 2022
Use Foxglove with the robot kit to start understanding your first robot

Foxglove joins the ROS Technical Steering Committee
ArticleROSMCAPFeb 3, 2022
Improving the open source robotics ecosystem
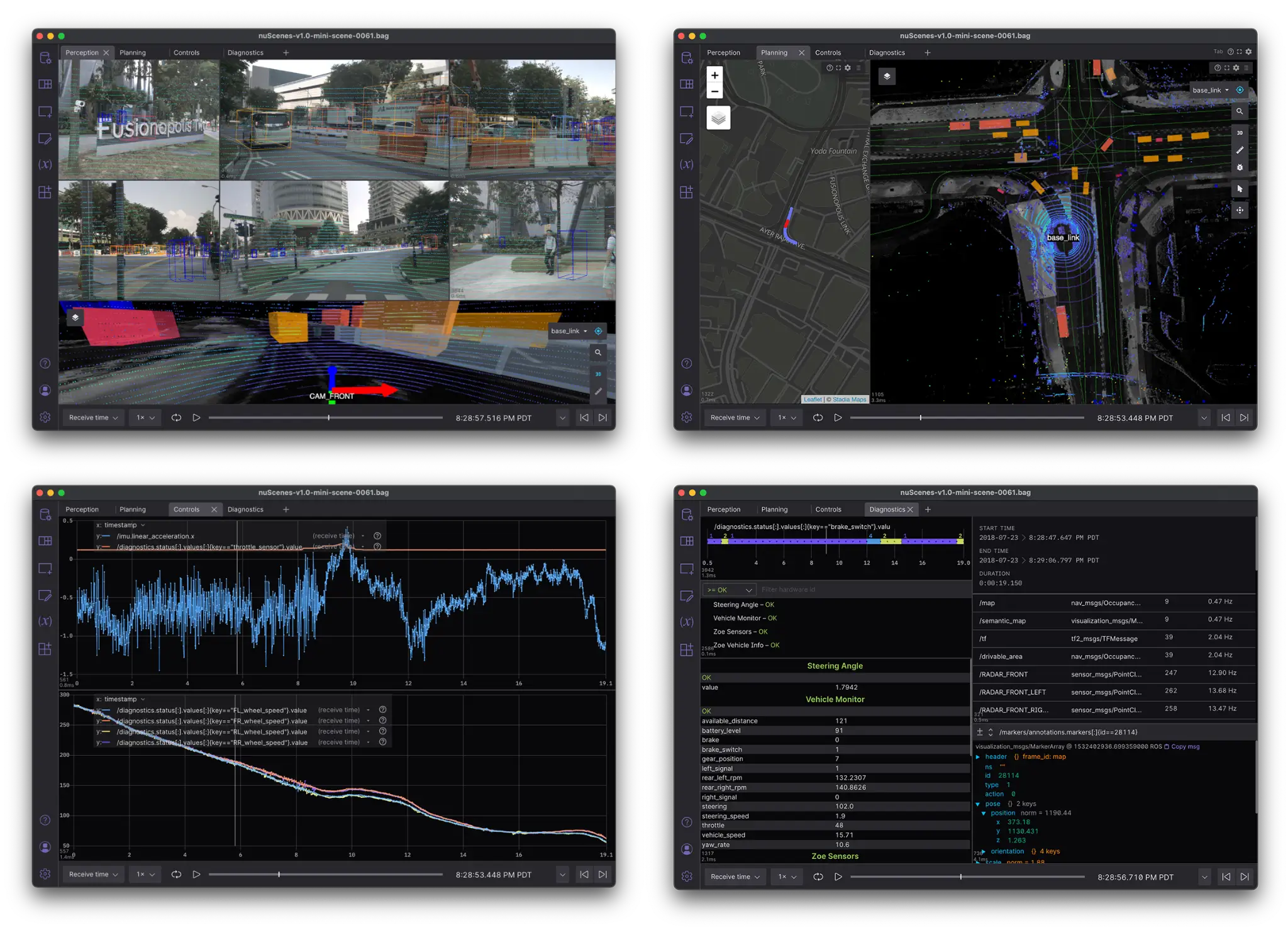
Visualizing nuScenes Data with Foxglove
ArticleROSVisualizationMCAPJan 12, 2022
Explore a rich self-driving car dataset with Foxglove's latest demo layout
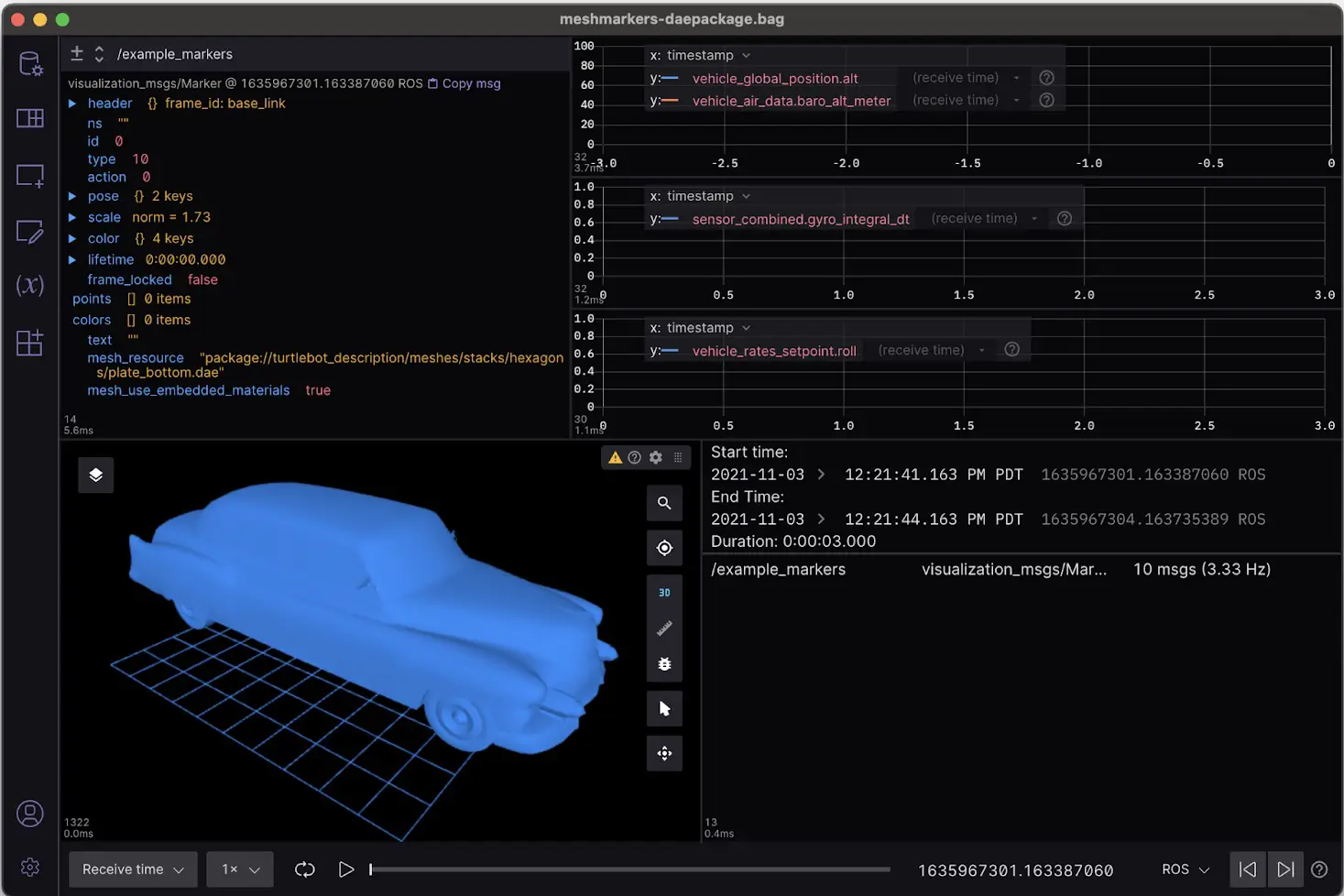
How to Visualize ROS Mesh Markers
TutorialROSVisualizationJan 10, 2022
Loading mesh resources inside Foxglove's 3D panel
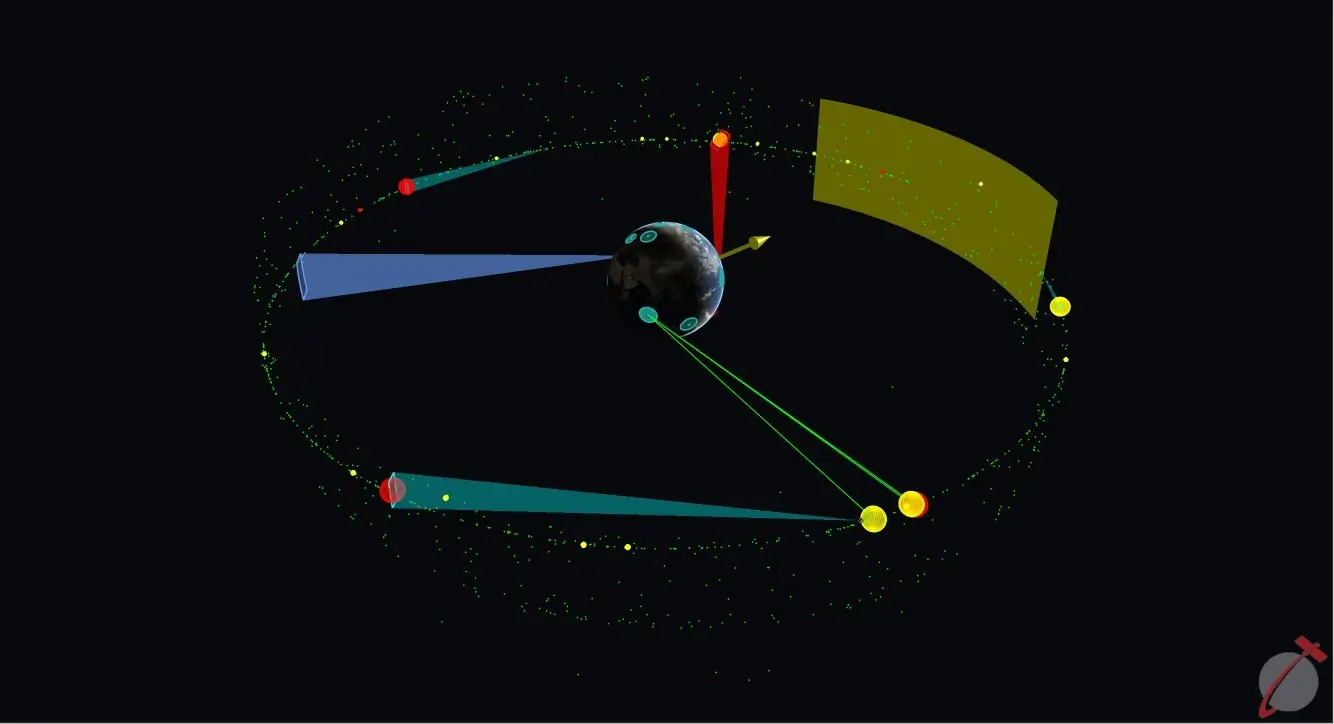
Spotlight: Stefan Novak of a.i. solutions on Taking Foxglove to Outer Space
SpotlightROSVisualizationNov 4, 2021
Writing custom panels in Foxglove using the extensions API
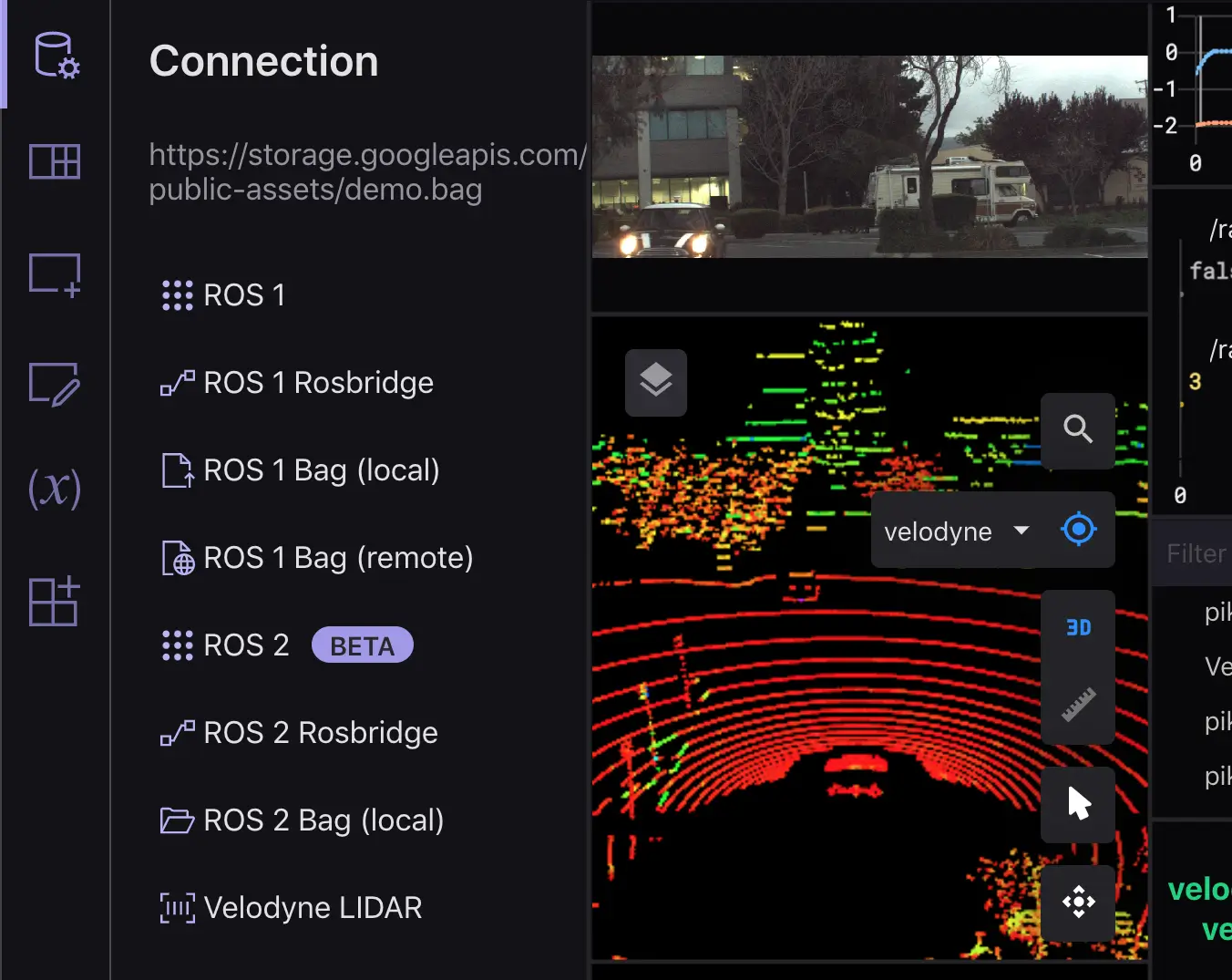
Announcing Live ROS 2 Support
ArticleROSVisualizationSep 12, 2021
Connect to your ROS 2 stack to visualize your robots' data in real time
Announcing ROS 2 Bag Support
ArticleROSVisualizationJul 14, 2021
Loading ROS 2 bag files for playback and visualization inside Foxglove

Annotate Your Robot's Camera Images with Image Markers
TutorialROSVisualizationJul 13, 2021
Translate image detection outputs into human-readable visualizations
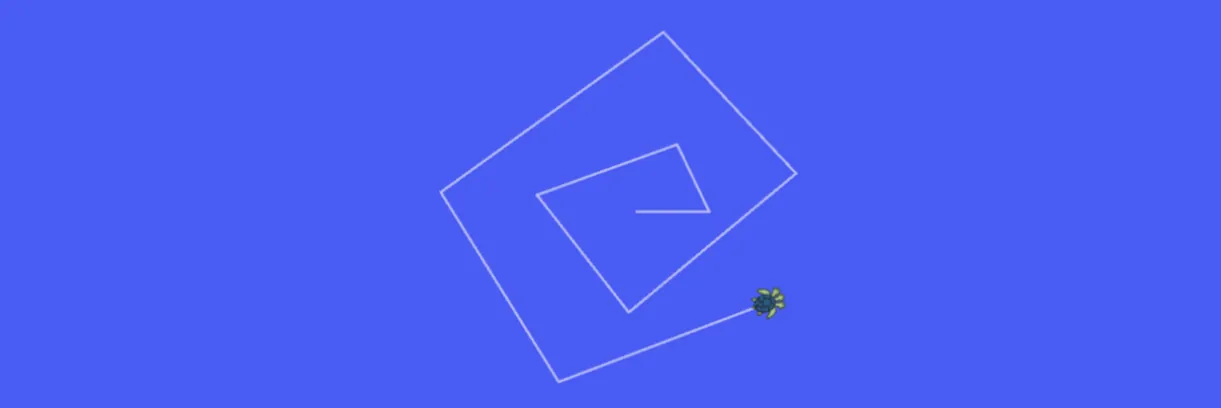
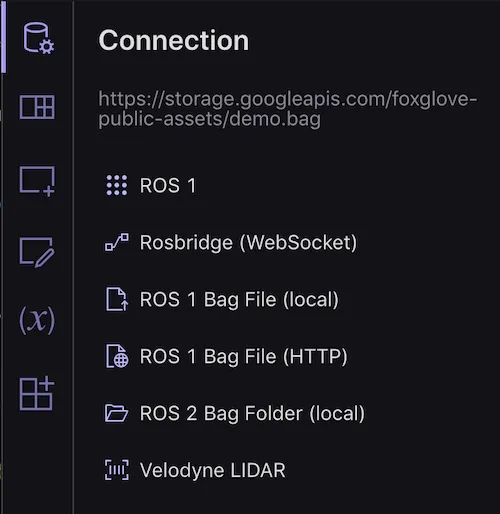
Running Your First ROS Node on Ubuntu, macOS, or Windows
TutorialROSJun 2, 2021
Use turtlesim and Foxglove to learn how to explore robotics data

The Building Blocks of ROS 1
ArticleROSMay 24, 2021
How the Robot Operating System (ROS) powers tomorrow’s robots.

Building and Visualizing Your First Robot
TutorialROSVisualizationMay 17, 2021
Get started in robotics with the Duckiebot and Foxglove